近日,我院肖茂华教授课题组在国际权威期刊《Engineering Applications of Artificial Intelligence》(IF=8.0,中科院一区,TOP,南农A类)上发表题为“A multi-agent-based cooperative optimization control method for the motor energy consumption and tracking accuracy of an unmanned electric tractor”的研究论文,该文详细介绍了基于多智能体联合优化的无人驾驶电动农机电机能耗与跟踪精度协同优化控制方法,实现了人工智能在农业工程机械中的应用。
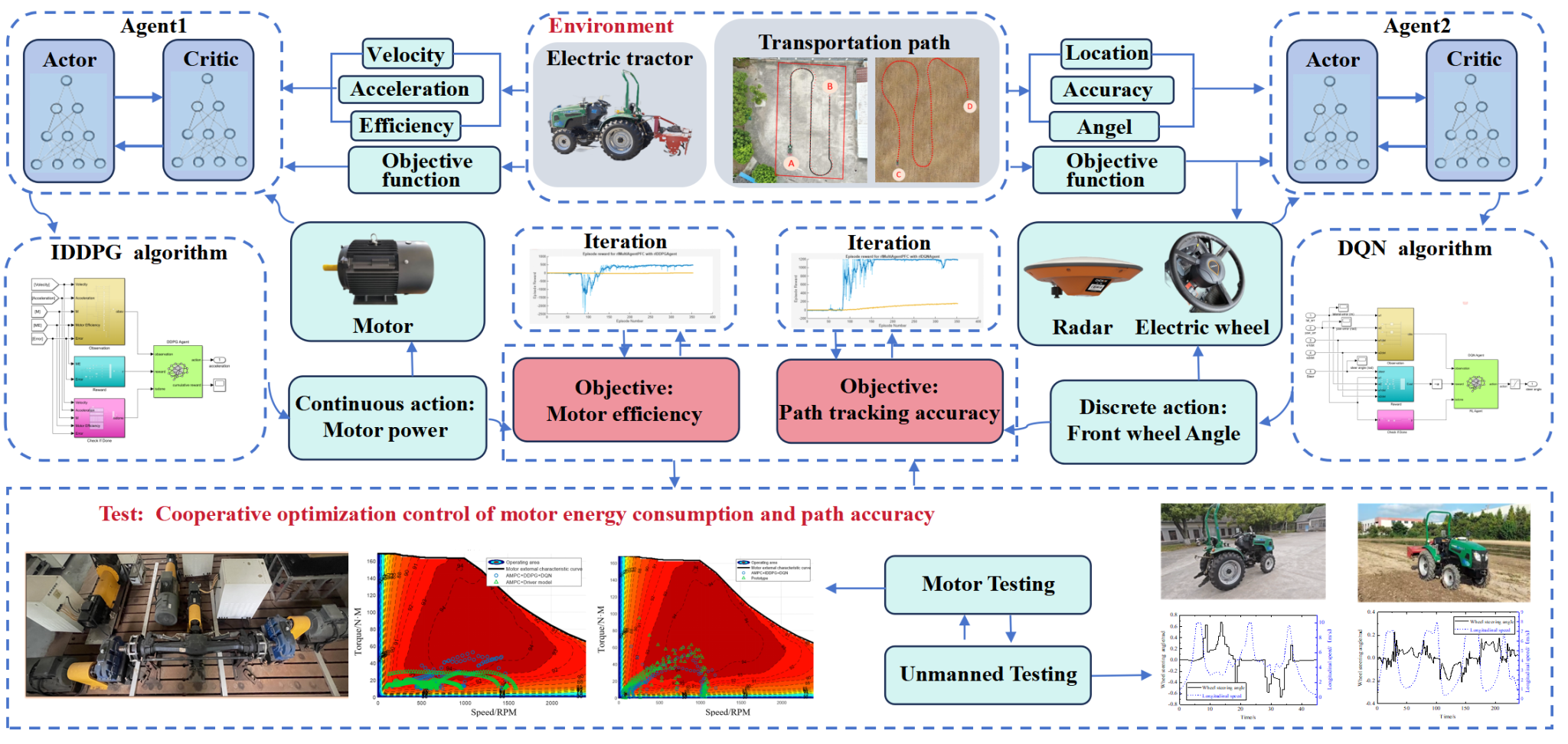
图1多智能体联合优化方法示意图
电动农机驱动系统与能源系统协调性差、电机能耗高以及路径跟踪精度低是限制电动农机无人驾驶发展的主要难题。运输转运作为拖拉机作业的重要工况之一,目前的相关研究较少。该研究围绕电动拖拉机的无人驾驶控制,针对当前驱动系统与能量系统协调差、能耗高、路径跟踪精度低等问题,提出了一种适用于运输工况的单电机电动拖拉机无人协同优化控制方法。具体包括:基于改进的DDPG算法进行纵向速度控制以提升电机效率,基于DQN算法进行横向速度控制以提高路径跟踪精度。研究为实现先进农业无人协同系统的智能控制提供了理论基础和技术支持。

南京农业大学工学院肖茂华教授为通讯作者,博士生胥文翔为第一作者,讲师朱晔钧,博士生杨彦朋、硕士生岳新渊、硕士生陈泰及中国一拖集团有限公司刘孟楠参与了本项工作。本工作得到了十四五国家重点研发计划(2022YFD2001204)及江苏省国际合作项目(BZ2022002)的支持。
论文链接:https://doi.org/10.1016/j.engappai.2025.111665



