
中科院1区Top | IF=7.7
研究作者及单位详情如上图|2024.11.09在线发表
多农机协同作业技术是提高农业生产效率和作业质量的重要手段,已成为未来智慧农业发展的必然趋势。该研究回顾了多农机协同作业技术的研究进展与趋势,系统性地概述了多农机协同作业技术。我院肖茂华教授课题组,首先提出了一个由三层区块组成的多农机协同作业技术架构。其次,结合研究现状,分别阐述了多机协同规划技术、多机协同通信技术、多机协同控制技术等关键技术方面的研究成果与存在的问题。以收获机—运粮车主从协同收获场景、同类作业的同构农机多机协同场景为例,系统性地总结了多机协同在农业中的典型作业场景。最后,总结了关键技术中现存的主要问题和解决办法,为多农机协同作业领域的研究者提供了新思路。
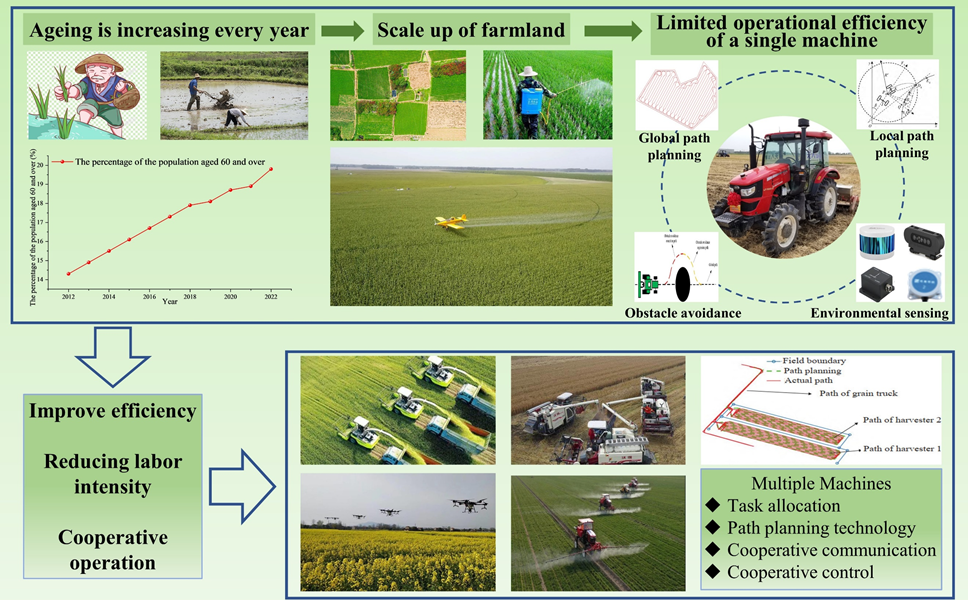
图1.农业向多机协同作业发展示意图
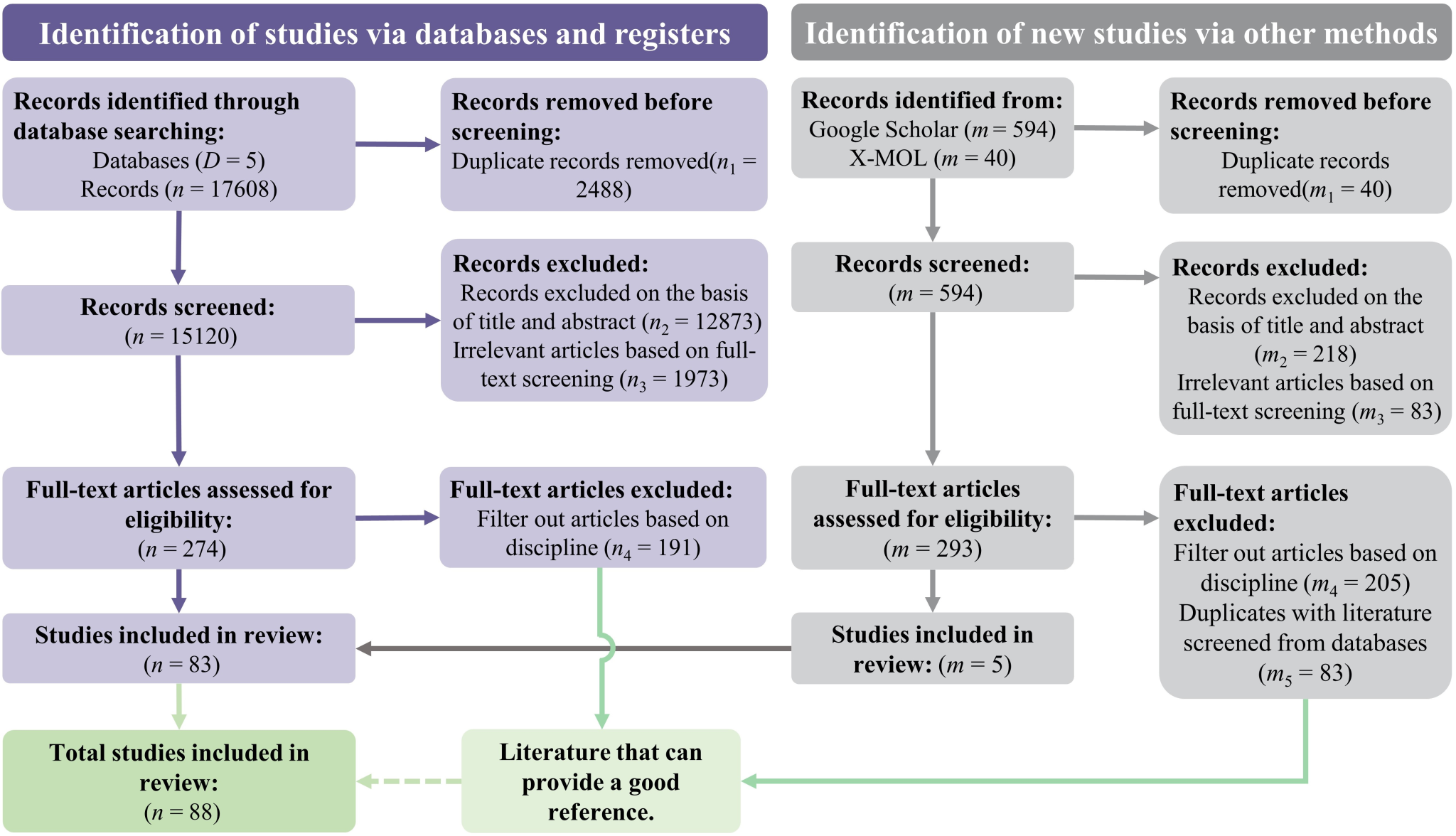
图2.文献筛选过程
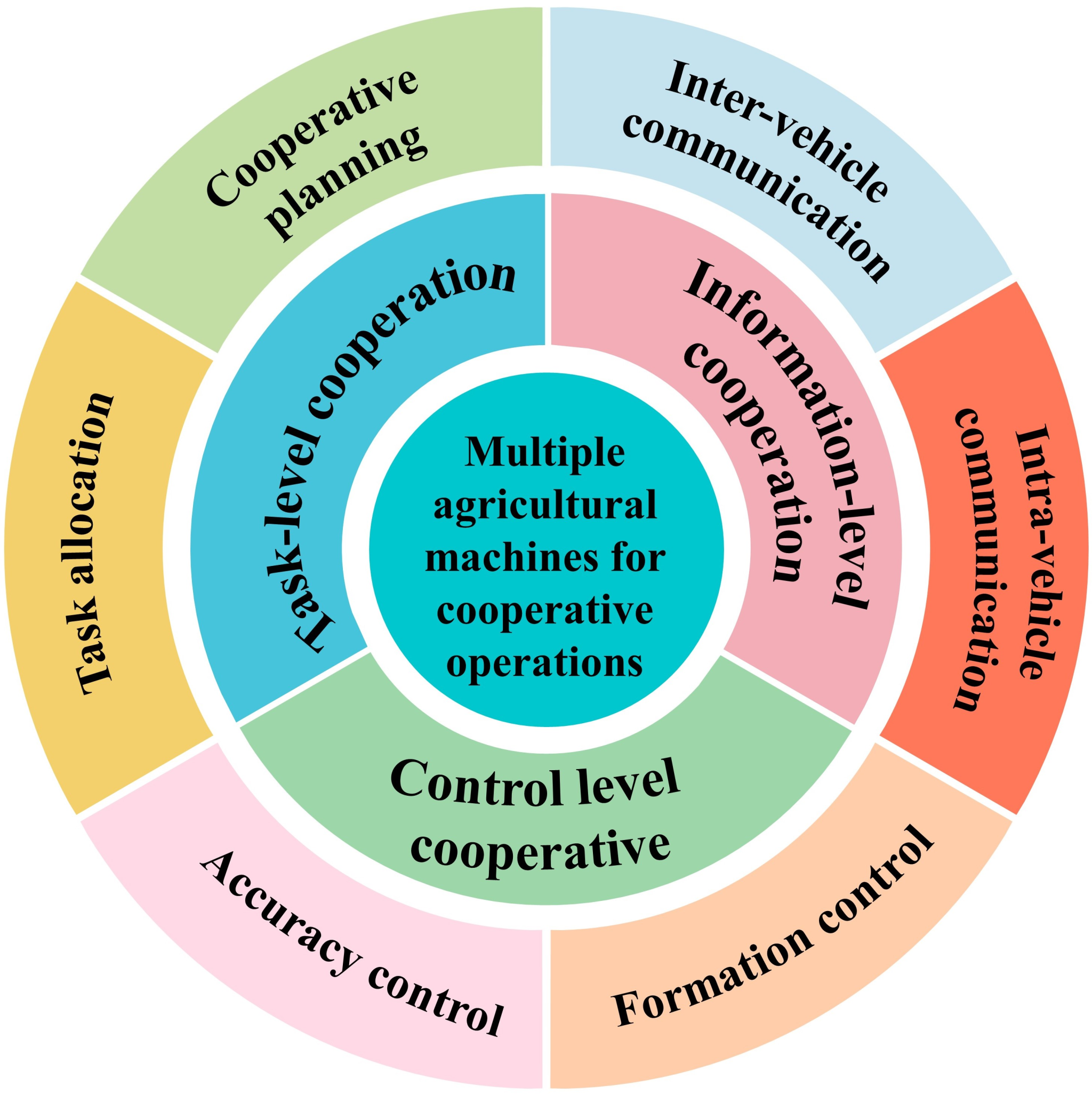
图3.多农机协同作业技术
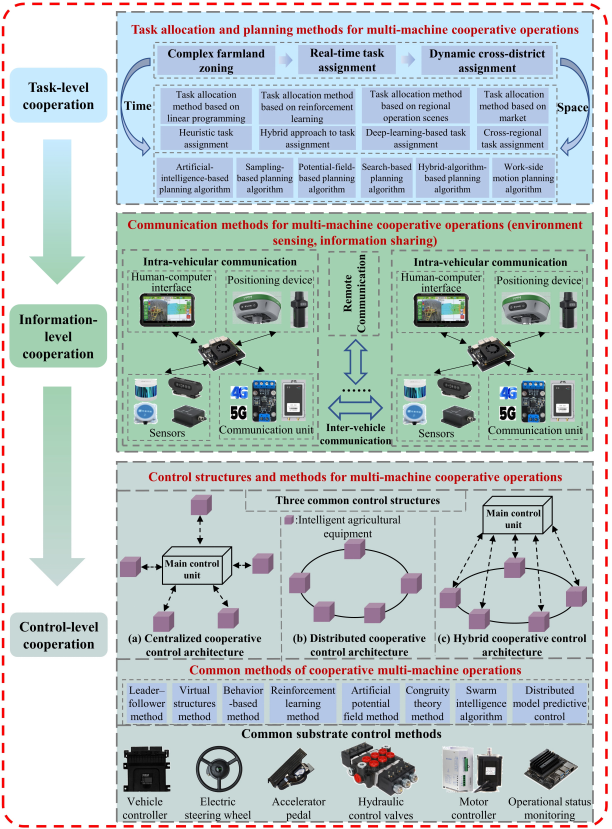
图4.多农机协同作业架构
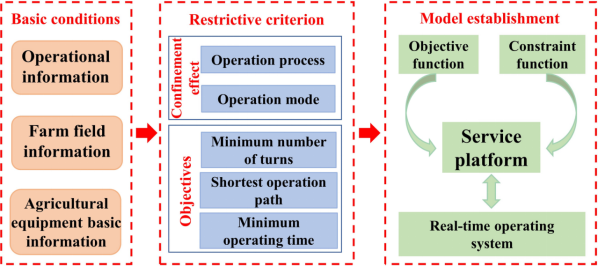
图5.任务分配流程思维导图
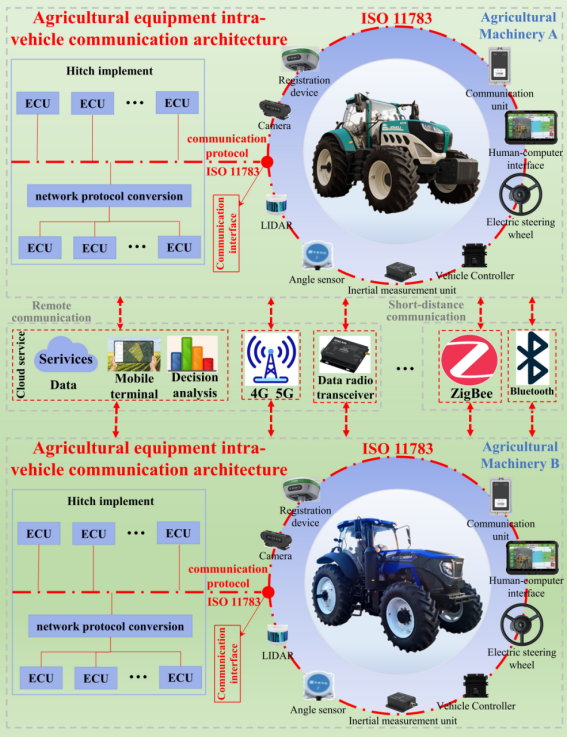
图6.农机车间通信架构

图7.虚拟结构法
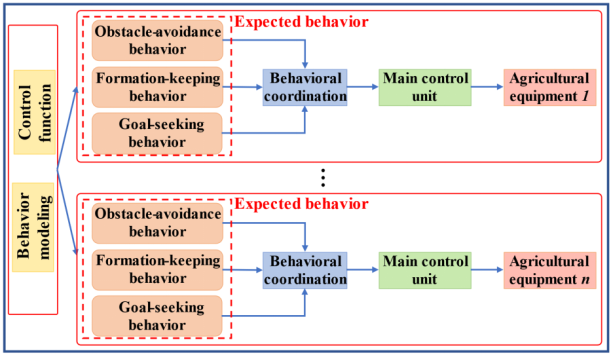
图8.基于行为的方法
图9.领航-跟随控制方法。(a)L-型控制方法 (b)L-L型控制方法
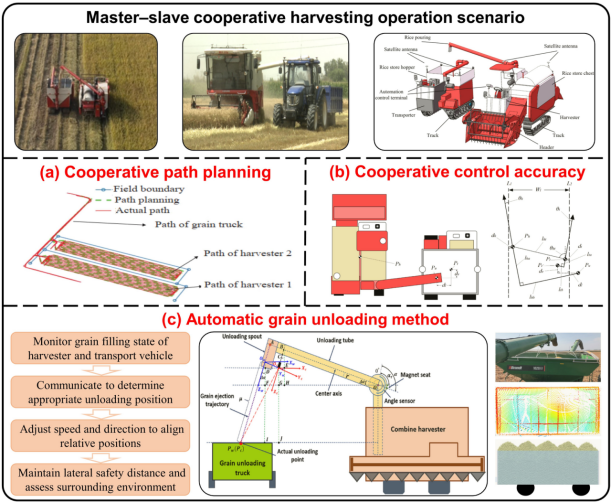
图10.协同卸粮工作流程
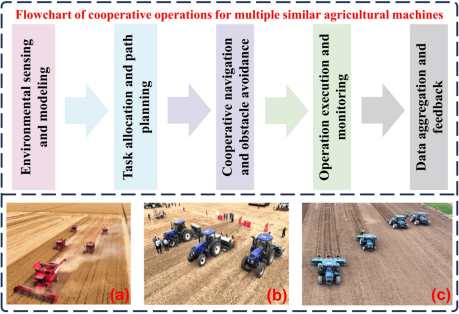
图11.同类农机协同作业
南京农业大学工学院魏文波为本文第一作者,南京农业大学工学院肖茂华教授为通讯作者,潍柴雷沃智慧农业研究院王辉博士为第二通讯作者,南京农业大学工学院耿国盛副教授、朱烨均博士、解臣硕博士生参与了思路设计与文章修改。



