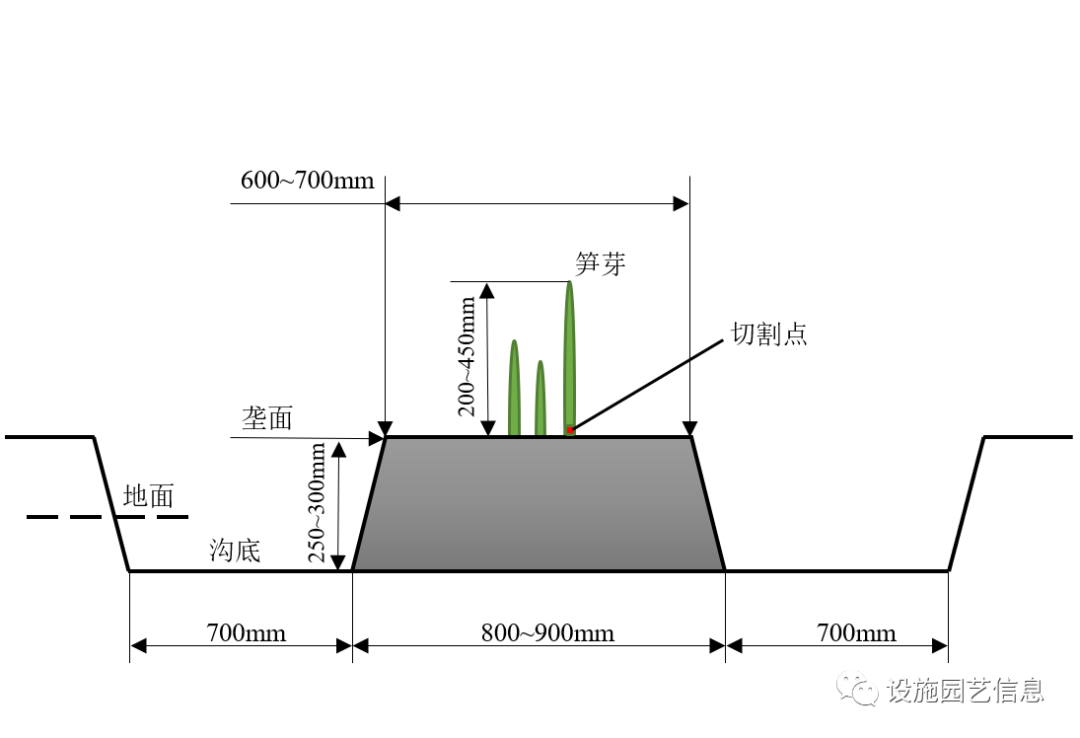
芦笋是一种多年生宿根性草本植物,其抗旱耐寒,对环境适应性强。从2014年到2020年,我国芦笋种植面积及产量逐年上升,到2020年,中国芦笋种植面积为150.1万公顷,占全球的90.6%;芦笋产量为861.3万吨,占全球的88.1%。已发展成为具有国际竞争优势的新兴产业,在全球芦笋贸易中占有举足轻重的地位。绿芦笋含水率高达92.9%,非常脆嫩,且生长较为密集,同一根系生长出来的芦笋嫩芽生长方向、生长成熟不一致,因此芦笋生产具有“劳动强度大、作业成本高、机械化程度低、生产效率低”的特点。但是目前全国几乎所有的芦笋都是依靠人工采收,繁重的劳动强度及匮乏的劳动力严重制约了芦笋产业稳定持续发展,因此芦笋农业生产急需“机器替人”。为解决这一现状,南京农业大学工学院汪小旵教授团队设计了一款芦笋采收机器人。


该团队根据绿芦笋的种植环境及采收农艺设计了以履带移动平台为载体,搭载各个功能模块实现设施环境下绿芦笋种植采收智能化,功能模块主要包括行走系统、视觉定位系统、控制系统、末端执行机构和人机交互系统五个子系统。
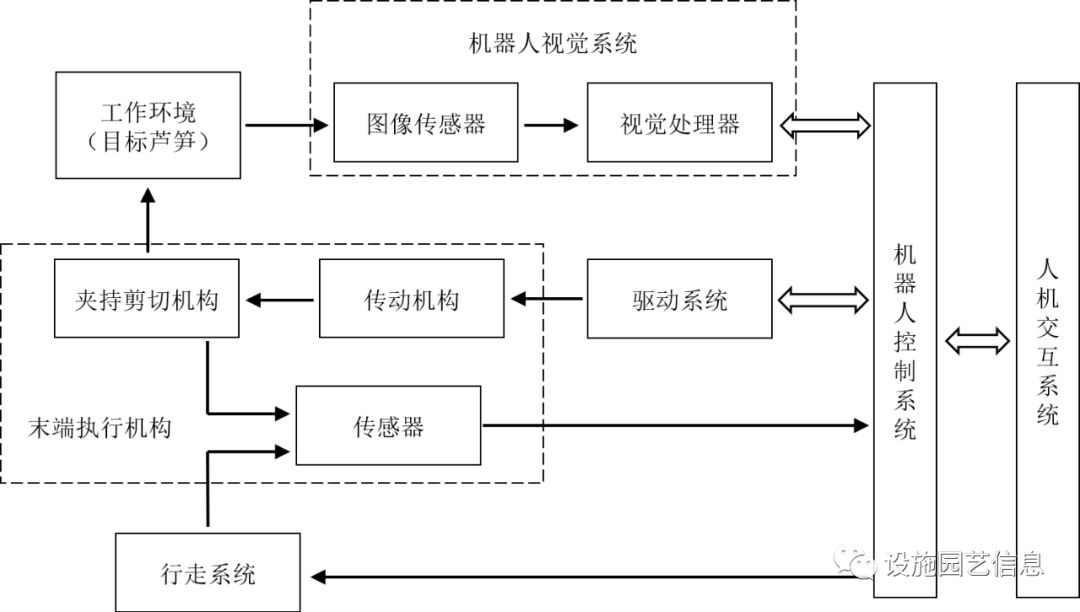
机器人视觉系通用于识别和检测出目标芦笋茎秆,通过成熟度判别和切割点定位后确定其切割点位置,并将位置信息实时发送给控制系统;机器人的控制系统接收来自视觉系统的目标位置后,进行机器人坐标与运动学(动力学)分析,控制末端执行机构完成规定的任务。人机交互系统可以实现机器人远程操控。

绿芦笋采收机器人主要由机械臂、末端执行器、芦笋收集框、视觉装置、履带底盘以及控制柜组成。整机尺寸:长x宽x高为140cm x 60cm x 90cm,其中履带底盘长x宽x高为80cm x 60cm x 27cm,机械臂加末端执行器有效工作半径为1080mm,可实现垄上芦笋的采收;机器人所装备蓄电池为48V×100Ah,满电状态下可供机器人持续工作8~10h。

夹剪一体式末端执行器采用一个动力即可实现绿芦笋的夹持与剪切。夹持部分采用软体海绵,在海绵和夹持手指之间贴有压力薄膜传感器,可以通过反馈力的大小来决定舵机所转动的角度,可避免在夹持剪切过程中对绿芦笋所造成的损伤。其配备有丝杆滑轨模组(可活动行程为50mm)以及超声波测距传感器。
在最终的夹持剪切环节之前,影响定位精度的有相机定位误差、相机坐标系到世界坐标系下点位转换误差以及机械臂运动所带来的误差,导致最终的到达点与芦笋的距离有偏差,此时采用超长波测距模块,测量其与芦笋的距离,通过设置一定的阈值,与测量值进行比对,测量值过大或者国小则分别对应滑轨模组的上滑块正向移动和负向移动。末端长宽高为254mm×103mm×62mm,末端张开中间宽度为40mm,长度为45mm,可在定位误差允许的范围内正常工作。

所设计的相机固定板安装在机械臂的J1轴,其上安装有深度相机Intel RealSense D435i和夜间补光灯;整体可随机械臂进行转动,实现24h垄间双边采收,提升了采收效率。采收测试中发现,机器人采收成功率为96.15%,采收损伤率为6.67%;将启动相机到采收完机械臂回到原始位置算为一个采收周期,统计所得一个采收周期下所需总时间为12.155s,当连续采收两根、三根时时间可分别缩短至11.07s、10.35s。以成品每支30g计算,包括转场及保养80%开勤率,24h可以有432kg的采收能力。




