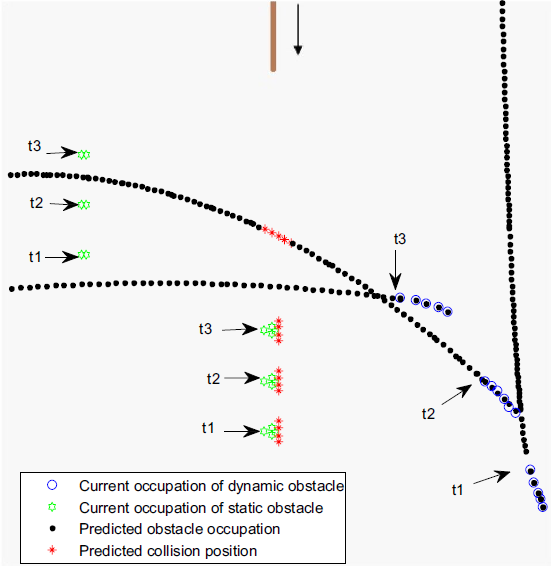
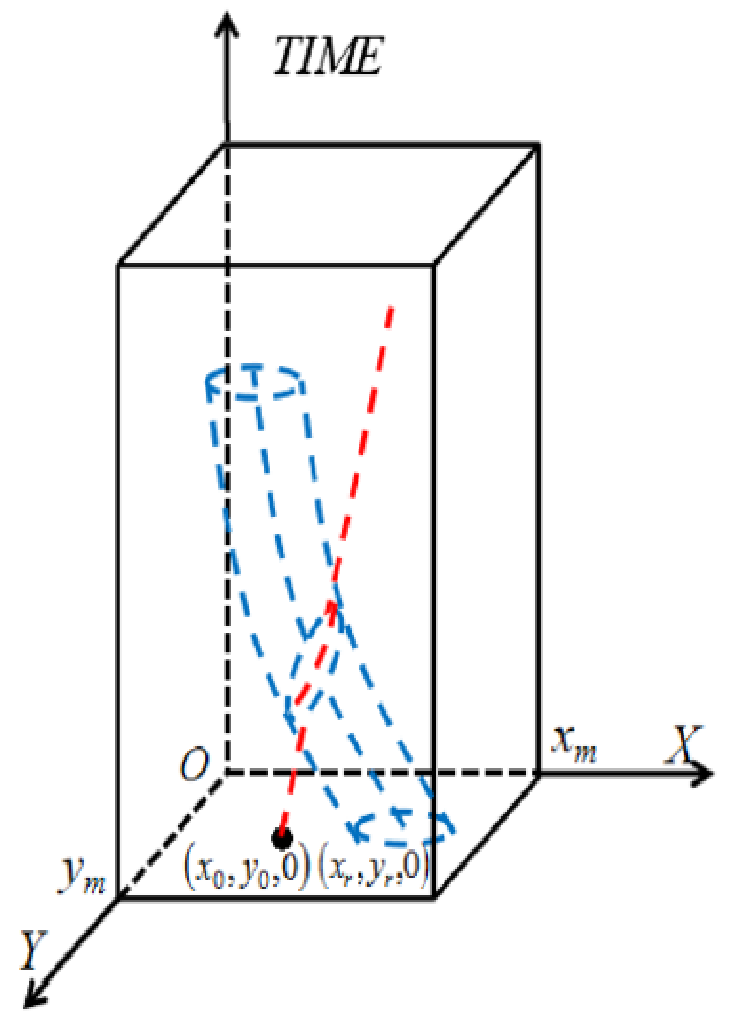
所提出的遇障速度控制策略能够根据障碍物的运动状态和危险程度以及障碍物与车辆之间的距离自动调整自主农业车辆的速度,从而提高自主农业车辆的智能性和安全性。控制策略包括两个步骤:使用改进的障碍物时空网格图在动态环境中预测碰撞,以及使用云模型避免碰撞的速度生成器。通过以草垛、拖拉机和行走人员为静态或动态障碍物的田间试验,表明所提出的速度控制策略具有较强的可行性和有效性。
成果发表:Xue Jinlin et al. Antonomous Robots, 44(6): 1047-1063 (2020)。一种无人农业车辆田间遇障速度控制方法 (ZL 2018 1 0082768.6).