近日,我院智能农机动力与无人系统团队联合浙江大学生物系统工程与食品科学学院农业装备与智能检测(AE&ID)团队在国际权威期刊Journal of Industrial Information Integration(IF=11.6,中科院一区,Top,南农A类)上发表了题为Real-time path planning for multi-scene headland turns in agricultural vehicles using panoramic vision and sequential frame correlation method的研究论文。该研究通过构建全景环视系统,结合深度学习与序列帧关联分析,提出了一种适用于农业车辆在多场景下进行地头转向的实时路径规划方法,为实现纯视觉导航的农业自动化系统提供了新思路。

地头转向是农业车辆在田间作业过程中的关键环节,相较于作物行跟踪,其转向角度更大、操作更复杂,对导航系统的连续感知与决策能力提出了更高要求。现有研究多依赖单一前视摄像头,导致在转向过程中视野受限,难以持续感知地头区域,限制了其在实际场景中的应用。该研究针对这一瓶颈,构建了由四个鱼眼摄像头组成的全景环视系统,通过图像拼接、失真校正与鸟瞰图生成,实现了对车辆周围环境的360度连续感知。
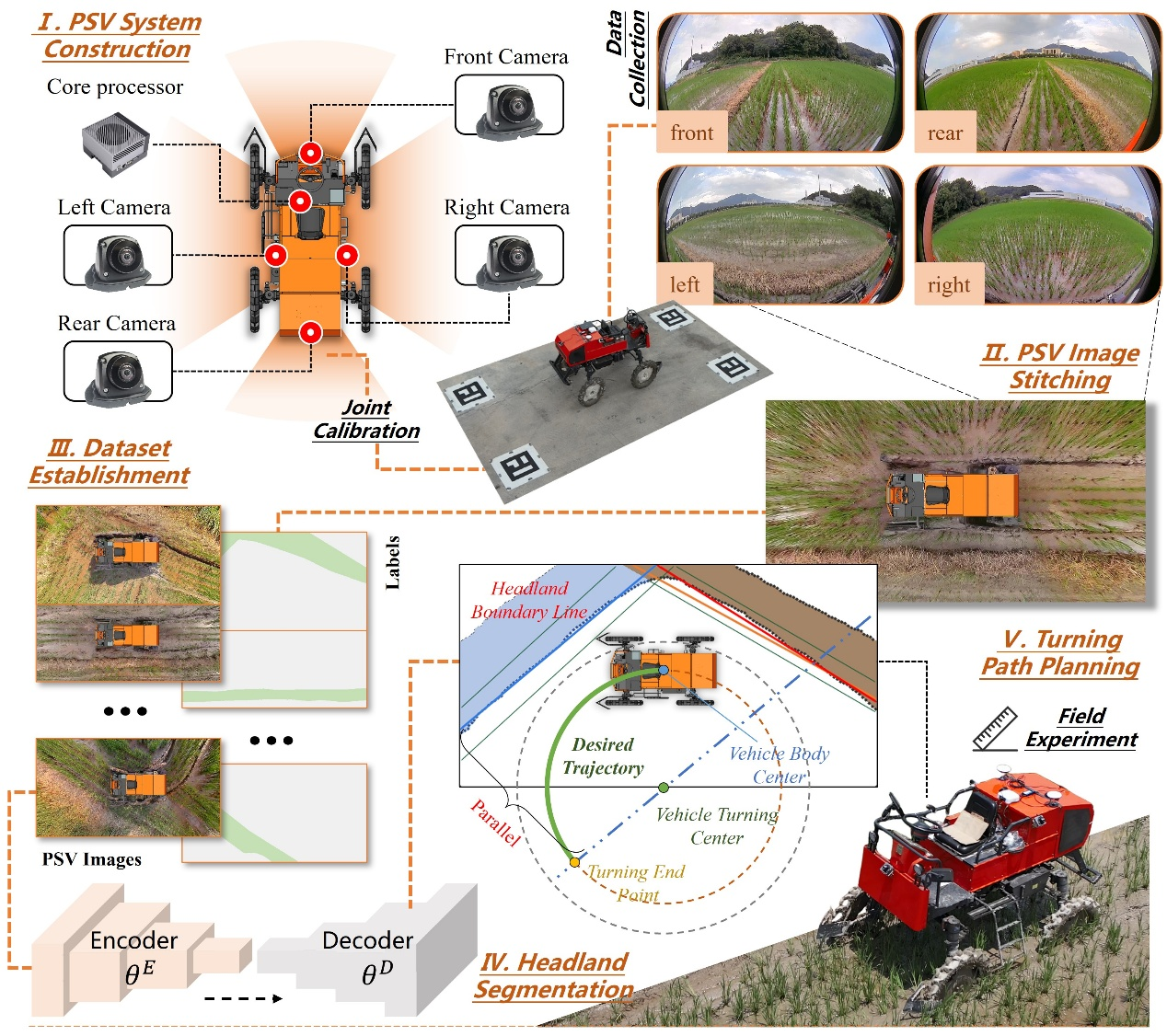
图1图形摘要
研究团队利用轻量级语义分割模型CGNet对地头区域进行精准识别,其平均交并比达到92.84%,边界检测平均偏差仅为5.63像素。在此基础上,通过分析连续帧之间地头区域的位置相关性,动态划分功能区域,并设计了适用于不同转向场景(如沿地头转向、面对地头U形转向、沿地头U形转向)的路径规划算法。该系统在田间导航实验中表现出良好的实时性与鲁棒性。
该研究不仅为解决农业车辆地头转向的视觉导航难题提供了可行的工业信息集成解决方案,也为果园、设施农业等复杂场景下的自主作业系统开发奠定了基础。未来,研究团队将进一步优化图像融合质量、扩展数据集,并探索在多作物、多地形条件下的推广应用。
南京农业大学工学院讲师李东方为本文第一作者。浙江大学生物系统工程与食品科学学院王俊教授为本文通讯作者。南京农业大学工学院肖茂华教授、朱烨均讲师、浙江大学崔绍庆研究员在实验数据采集与数据分析方面为本研究提供了重要指导。研究工作得到江苏省农业科技自主创新资金项目(Grant No. CX(23)3105)与浙江省重点研发计划项目的资助(Grant No. 2021C02028, 2023C02049)。



